




Внимание! Размещенный на сайте материал имеет информационно - познавательный характер, может быть полезен студентам и учащимся при самостоятельном выполнении работ и не является конечным информационным продуктом, предоставляемым на проверку.
Асинхронные двигатели. Информационный материал.
Автор страницы: admin
Тема 6.
Асинхронные Двигатели.
Наряду ДПТ в электроприводах роботов применяются асинхронные двигатели (АД), однако их применение пока ограничено. Это объясняется сложностью и высокой стоимостью электронных преобразователей, применяемых для регулирования частоты вращения. Тем не менее в ПР грузоподъемностью свыше 40 кг их использование вполне оправдано.
В настоящее время асинхронные электродвигатели потребляют около половины всей вырабатываемой в мире эл. энергии и широко применяются в качестве электропривода с постоянной частотой вращения большинства механизмов. Это объясняется простотой конструкции , надежностью и высоким значением КПД.
В зависимости от вида питающего напряжения и обмотки статора различают трехфазные и однофазные асинхронные двигатели.
5.1 Устройство асинхронного двигателя.
Двигатель состоит из двух основных частей: неподвижной – статора и подвижной – ротора. Магнитопроводы статора и ротора собираются из листов электротехнической стали 0.35 мм или 0.5 мм, которые до сборки покрывают с обоих сторон изоляционной пленкой (обычно лаком ) для ограничения в них вихревых токов. На внутренней цилиндрической поверхности магнитопровода статора и на внешней цилиндрической поверхности магнитопровода ротора имеютя пазы , в которых размещают проводники обмоток соответственно статора и ротора.
Асинхронные машины как и все электрические машины обратимы и могут работать как в качестве генераторов так и двигателей.
В основном их используют в качестве двигателей трехфазного тока.
Рис.1 – электромагнитная схема асинхронной машины.
Рис 2 - направление токов и электромагнитного момента при работе асинхронной машины в режиме двигателя.
5.2 Вращающееся магнитное поле статора асинхронного двигателя.
![]() В пазах статора размещается 3 катушки (обмотки ) со смещением друг относительно друга на 120°. Каждая из обмоток создает пульсирующий синусоидальный магнитный поток. Магнитные потоки смещены по фазе на 120° друг относительно друга.
В пазах статора размещается 3 катушки (обмотки ) со смещением друг относительно друга на 120°. Каждая из обмоток создает пульсирующий синусоидальный магнитный поток. Магнитные потоки смещены по фазе на 120° друг относительно друга.
![]()
![]()
![]()
![]() Ua
Ua

![]()

 t
t
1 2 3 4
Uв


![]()


 t
t
![]()
Uc ![]()




![]() t
t
Фа = Фм*sin(wt)
Фв = Фм*sin(wt + 120°)
Фс = Фм*sin(wt + 240°)
Для определения результирующего магнитного потока изобразим потоки Фа, Фв, Фс на плоскости системы прямоугольных декартовых координат.
![]() y
y
![]()
![]()
![]()
![]() Y Фа C
Y Фа C
![]()
![]()
![]()
![]()
![]()
![]()
![]() А Х
А Х
х
Фв Фс
![]()
![]()
Z В
Магнитные потоки пульсируют перпендикулярно плоскости катушек.
Найдем проекцию всех магнитных потоков на ось Х.
Фх = -Фв*cos30° +Фс*cos30° = Фм*sin(wt + 120°)*cos30° +
Фм*sin(wt + 240°)cos30° = (3/2)*Фм*cos(wt).
Найдем проекцию всех магнитных потоков на ось y.
Фy = Фа - Фв*sin30° - Фс*sin30° = Фм*sin(wt) -
- Фв*sin(wt + 120°)*sin30° - Фм*sin(wt + 240°)*sin30° =
= (3/2)*Фм*sin(wt) ;
Результирующий магнитный поток.
![]() 2 2
2 2
Ф = Фx + Фy = 3 / 2*Фм
Таким образом, результирующий магнитный поток по величине не изменится, изменится только его положение в пространстве.
![]()
t = to Фв
![]()
![]() a = 0
a = 0
Ф
![]()
Фс
![]()
t = t2 Фс
![]()
![]() a = 180°
a = 180°
![]()
Ф
Фв
![]()
![]() Ф
Ф
![]()
![]()
![]() t = t1 Фа
t = t1 Фа
a = 90°
![]()
![]()
![]() Фв
Фв
Фс
![]()
Ф
![]() Фв Фс
Фв Фс
a = 270° t = t3
![]()
![]()
![]() Фв
Фв
Фа
Ф
У однофазного синхронного двигателя имеется две катушки сдвинутые в пространстве относительно друг друга на 90° - катушка возбуждения и управления.
![]()
![]() Uв
Uв
![]()


Uу
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() Фу
Фу
![]()
![]() 1 2 3 4 5
1 2 3 4 5
![]()

Фв
![]()
![]()
1 2 3 4 5
![]()
5.3 Принцип действия асинхронного двигателя.
В асинхронной машине одну из обмоток размещают на статоре 1, а вторую на роторе 3. Между ротором и статором имеется воздушный зазор , который для улучшения магнитной связи между обмотками делают по возможности малым. Обмотка статора 2 представляет собой трехфазную обмотку, катушки которой размещают равномерно по окружности статора. Фазы обмотки статора AX, BY, CZ соединяют по схеме звезда или треугольник и подключают к сети трехфазного тока. Обмотку ротора 4 выполняют трехфазной или короткозамкнутой и размещают равномерно вдоль окружности ротора.
При питании обмотки статора трехфазным током создается магнитное поле, частота вращения которого (синхронная)
n1 = 60*f1 / P ;
где f1 - частота тока (50 Гц.),
P - число пар полюсов вращающегося магнитного поля.
Если ротор неподвижен или частота его вращения меньше синхронной , то вращающееся магнитное поле пересекает проводники обмотки ротора и индуцирует в них ЭДС. На рис.1 показано согласно правилу правой руки , направление ЭДС, индуцированной в проводниках ротора при вращении магнитного потока Ф про часовой стрелке, при этом проводники ротора перемещаются относительно потока Ф против часовой стрелки.
На проводники с током , расположенные в магнитном поле , действуют эл. силы, направление которых определяется по правилу левой руки.
Суммарное усилие, приложенное по всем проводникам ротора, образует электромагнитный момент М, увлекающий ротор за вращающимся магнитным полем. Если этот момент достаточно велик, то ротор приходит во вращение и его установившаяся частота вращения n¤ соответствует равенству электромагнитного момента тормозному, созданному приводимым во вращение механизмом и внутренними силами трения.
n2 < n1
S = ( n1 - n2 ) / n1*100 % ;
Скольжение - это относительная разность частот вращения магнитного поля и ротора. При двигательном режиме: 0<S<1 Если ротор асинхронный машины разогнать с помощью внешнего момента (например, каким-либо двигателем) до частоты, большей частоты вращения магнитного поля n1, то изменится направление ЭДС в проводниках ротора, т.е асинхронная машина перейдет в генераторный режим. При этом изменит свое направление
электромагнитный момент М, который станет тормозящим. В генераторном режиме асинхронная машина получает механическую энергию от первичного двигателя, превращается в электрическую и отдает в сеть, при этом S<0.
Если изменить направление вращения ротора (или магнитного поля) так, чтобы магнитное поле и ротор вращались в противоположных направлениях, то ЭДС будет направлена так же, как в двигательном режиме, т.е машина будет получать из сети активную мощность. Однако в данном режиме электромагнитный момент М направлен против вращения ротора, т.е является тормозящим. Этот режим работы асинхронной машины называют режимом электромагнитного тормоза. При этом: n2<0, S>1
Таким образом, характерная особенность асинхронной машины наличие скольжения, т.е неравенство частот вращения n1 и n2. Только при указанном условии в проводниках обмотки ротора индуцируется ЭДС и возникает электромагнитный момент. Поэтому машину называют асинхронной (ее ротор вращается не синхронно с полем).
По конструкции асинхронные двигатели подразделяют на два основных типа: с короткозамкнутым ротором и фазным ротором (последние называют также двигателями с контактными кольцами). Короткозамкнутый ротор выполняется в виде "беличьей клетки " и никаких выводов не имеет. В электрическом отношении "беличья клетка" представляет собой многофазную обмотку, срединную по схеме "звезда" и замкнутую накоротко.
Фазный ротор имеет трехфазную обмотку с тем же числом полюсов. Обмотку ротора обычно соединяют по схеме "звезда", три конца которой выводят к трем контактным кольцам, вращающимся месте с валом машины. С помощью металлографитных щеток скользящих по контактным кольцам, в ротор включают пусковой или пускорегулирующий реостат, т.е в каждую фазу ротора вводят добавочное активное сопротивление. По конструкции двигатели с короткозамкнутым ротором проще двигателей с фазным ротором и более надежны (у них отсутствуют кольца и щетки, требующие систематического наблюдения, периодической замены). Основные
недостатки этих двигателей сравнительно небольшой пусковой момент и значительный пусковой ток Поэтому их применяют в тех электрических приводах, где не требуются большие пусковые моменты (электропривод металлорежущих станков, вентиляторов).Асинхронные двигатели малой мощности и микродвигатели также выполняют с короткозамкнутым ротором.
В двигателях с фазным ротором имеется возможность с помощью пускового реостата увеличивать пусковой момент до максимального значения и уменьшать пусковой ток. Следовательно, такие двигатели можно применять для привода машин и механизмов, которые пускают в ход при большой нагрузке (электроприводы грузоподъемных машин и.т.д).
5.4 Электродвижущие силы обмоток статора и ротора.
ЭДС в проводнике определяется по правилу правой руки.
Lпр = В*L*v ;
где В -магнитная индукция в воздушном зазоре.
L - длина проводника ;
v - линейная скорость движения проводника в магнитном поле.
Обмотка ротора пересекается магнитным потоком с частотой.
ns = n1-n2 ;
частота индуцируемой в ней ЭДС
f2 = p*ns / 60 = p*(n1-n2) / 60 ;
Учитывая ,что
n1*p / 60 = f1 ; и (n1 - n2) / n1 = s
получим
f2 = (p*n1 / 60 )* (n1-n2 / n1) ;
f2 = f1*s ;
При вращении ротора ЭДС в его обмотке
Е2s = 4.44*f2*w2*kоб2*Фм = 4.44*f1*s*w2*kоб2*Фм ;
где w2 - число витков в обмотке ротора.
kоб2 - обмоточный коэффициент ротора для основных гармоник.
Kоб - показывает на сколько уменьшается ЭДС обмотки переменного тока вследствие ее распределения по нескольким пазам по сравнению с сосредоточенной обмоткой ;
Фм - амплитудное значение магнитного потока.
ЭДС при заторможенном роторе
Е2 = 4.44*f1*w2*kоб2*Фм ;
Отсюда
Е2s = S*Е2 ;
Если обмотка ротора замкнута, по ней проходит ток с частотой f2, который создает бегущую волну МДС F2, вращающуюся относительно ротора с частотой
nf2 = 60*f2 / p = 60*f1*S / p = n1*S = n1 - n2
MDC ротора вращается в ту же сторону, что и магнитное поле статора.
Частота вращения МDC ротора относительно статора равна сумме частот
n2 + nf2 = n1 ;
Следовательно, при вращении ротора МДС статора F1 и МДС ротора к F2 вращается в пространстве с одинаковой частотой в одну и ту же сторону, т.е. относительно друг друга они неподвижны.
Таким образом , в асинхронной машине магнитное поле , вращается с частотой n1, возникает в результате совместного действия бегущих волн МДС ротора и статора. Оно служит связывающим звеном между статором и ротором , обеспечивает обмен энергией между ними , точно так же, как переменное магнитное поле в трансформаторе осуществляет передачу энергии из первичной обмотки во вторичную.
5.5 ЭНЕРГЕТИЧЕСКАЯ ДИАГРАММА АСИНХРОННОЙ МАШИНЫ
При работе асинхронной машины в двигательном режиме статору
из сети подводится мощность
P1= m1*U1*J1*cosj
Где m1- число фаз обмотки статора.
Часть этой мощности растрачивается на покрытие
электрических потерь DPэл1 в активном сопротивлении обмотки
статора магнитных потерь DРм1 в статоре. В ротор посредством вращающегося магнитного поля передается электромагнитная мощность.
Рэл = Р1-DРэл1-DРм1
Часть электромагнитной мощности, полученной ротором, тратится на покрытие электрических потерь DРэл¤ в его обмотке оставшаяся часть мощности Рэм превращается в механическую мощность.
Рэл= Рмех-DРт-DРдоб,
где DРт - потери на трение (механические), DРдоб - добавочные потери.
Выразим электромагнитную механическую мощность через электромагнитный вращающий момент М.
Рэм = М*W1; Рмех = М*W2, где W1 = 2pn1 / 60 ; W = 2pn2 /60
Угловые скорости соответственно магнитного поля и
ротора (рад/с).
Р2
![]()
![]()
![]()
![]() Р1 Рэм Рмех
Р1 Рэм Рмех
![]()
![]()
![]() DРэм DРм1 DРэл2
DРэм DРм1 DРэл2
DРт DРдоб
Рис. Энергетическая диаграмма.
Из энергетической диаграммы следует, что: DРэл2= Pэм-Pмех или
DРэл2 = M*W1 - M*W2 = M*W1(W1 - W2 ) / W1 = М*W1*S
Из этой формулы получаем:
М = DPэл2 / (W*S1);
S = DPэл2 / (М * W) ;
S = DPэл2 / Рэм. ;
Полученные формулы позволяют произвести анализ важнейших
свойств асинхронного двигателя, а именно установить связь между
скольжением и КПД, а также зависимость электромагнитного момента от параметров машины и режима ее работы.
5.6 СВЯЗЬ МЕЖДУ СКОЛЬЖЕНИЕМ И КПД АСИНХРОННОЙ МАШИНЫ
Представим КПД асинхронного двигателя в виде.
h = Р2 / Р1 = (Рэм / Р1)*(Р2 / Рэм) = h1*h2 ;
где h1 и h2 - КПД статора и ротора.
Поскольку ; n2 = Р2 / Рэм = (Рэм - DРэл2 - DРт - DРдоб) / Рэм
Справедливо неравенство
h2 < (Рэм - Рэл2) / Рэм < (1 - DРэл2) / Рэм < (1 - S) ;
Следовательно,
h < h2 < (1 - S )
Таким образом, для работы асинхронного двигателя в
номинальном режиме с высоким КПД необходимо, чтобы в этом режиме
он имел небольшое скольжение. Обычно Sном=0,01-0,06; при этом
обмотку ротора выполняют с небольшим активным сопротивлением.
Номинальную частоту вращения ротора;
n2 ном= n1*(1-S)
можно принять равной приблизительно 0,97*n1.
При необходимости получения частоты вращения n1>3000 об/мин
применяют повышенную частоту тока f1>50 Гц. Так, например, в
авиации для повышения частоты вращения электродвигателей с целью снижения их массы и габаритов используют частоту тока f1=400Гц.
5.7 ЭЛЕКТРОМАГНИТНЫЙ ВРАЩАЮЩИЙСЯ МОМЕНТ АСИНХРОННОЙ МАШИНЫ
Формулу М =DРэл2 / (W1*S), полученную из энергетической
диаграммы, преобразуем к удобному для анализа виду, подставив в
нее значения.
W1 = 2pn1/60 = 2pf2/р ;
DРэл2 = м2*J2*E2s*cosy2
где м2 - число фаз ротора,
J2 - ток через обмотку ротора,
Е2s= sЕ2 - ЭДС в обмотке ротора.
y2 - угол сдвига фаз между ЭДС и током ротора.
Получаем;
![]() М =[ (Р*m2*kоб2) / Ö2 ] * Фм*J2*cosy2 = См*Фм*J2*cosy2
М =[ (Р*m2*kоб2) / Ö2 ] * Фм*J2*cosy2 = См*Фм*J2*cosy2
![]() где См = Рм2 * kоб2 / Ö 2 - постоянная.
где См = Рм2 * kоб2 / Ö 2 - постоянная.
Эта формула справедлива не только для асинхронных машин, но и для электрических машин всех типов. Во всех этих машинах электромагнитный момент пропорционален произведению магнитного потока на активную составляющую тока ротора.
5.8 ПУСК АСИНХРОННЫХ ДВИГАТЕЛЕЙ
При пуске двигателя по возможности должны удовлетворяться основные требования: процесс пуска должен осуществляться без сложных пусковых устройств; пусковой момент должен быть достаточно большим, а пусковые токи - по возможности малыми. Практически используют следующие способы пуска:
1) Непосредственное подключение обмотки статора к сети
(прямой пуск);
2) Понижение напряжения, подводимого к статору;
3) Подключение к обмотке ротора пускового реостата.
1) Прямой пуск применяют для пуска асинхронного двигателя с
короткозамкнутым ротором. Двигатели этого типа малой и средней
мощности обычно проектируются так, чтобы при непосредственном
подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и превышений температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходной процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободным током и учитывать только установившееся значение тока переходного процесса. Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока. Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором - низкой стоимости и высоким энергетическим показателем (№, cosv и д.р.).
2) Пуск при пониженном напряжении применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями.
а) Переключением обмотки статора с помощью переключателя с нормальной схемы 'треугольник 'на пусковую схему 'звезда'. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в r3 раз, что обуславливает уменьшение фазных токов в r3 раз и линейных токов в 3 раза. По окончанию процесса пуска и разгона двигателя до нормальной частоты вращения обмотку статора переключают обратно на нормальную схему.
б) Включение в цепь обмотки статора на период пуска
добавочных активных (резисторов) или реактивных (реакторов)
сопротивлений.
При этом на указанных сопротивлениях создаются некоторые падения напряжения DU , пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС E, индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения DU , на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактом К1.
в) Подключением двигателя к сети через понижающий автотрансформатор, который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой. Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны
квадрату приложенного напряжения, поэтому их можно использовать
при пуске двигателя без нагрузки или при незначительной нагрузке.
3) Пуск с помощью реостата в цепи ротора применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат Rg, то активное сопротивление цепи ротора увеличится. При этом максимальный момент не изменяется, а пусковой момент возрастает. Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо
развивать максимально возможный пусковой момент.
5.9 ИЗМЕНЕНИЕ НАПРАВЛЕНИЯ ВРАЩЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из сети.
5.10 РЕЖИМ ЭЛЕКТРОМАГНИТНОГО ТОРМОЖЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
Если при вращающемся роторе изменяется направление вращения поля асинхронной машины, то оно оказывает на ротор тормозящее действие. При этом частота вращения ротора n¤<0, а следовательно, скольжение S>1. В этом режиме машина потребляет из сети электрическую мощность.
Чтобы перевести двигатель в режим электромагнитного торможения, следует изменить направление вращения магнитного поля (переключив два любых провода, присоединяющих фазы обмотки статора к сети трехфазного тока) и ввести в цепь ротора активное сопротивление.
Добавочное активное сопротивление в цепи ротора необходимо для ограничения силы тока машины, который при замкнутом на коротко роторе достигает большого значения. Практически режим электромагнитного торможения используют для быстрого останова механизмов. Его называют также торможением противовключением. Достоинство режима - возможность создавать большие тормозные моменты при низких частотах вращения.
При уменьшении частоты вращения ротора до нуля необходимо отключить двигатель от сети, иначе ротор начнет вращаться в противоположном направлении.
5.11 РЕЖИМ ДИНАМИЧЕСКОГО ТОРМОЖЕНИЯ АСИНХРОННЫХ ДВИГАТЕЛЕЙ
В данном режиме статор асинхронной машины отключают от сети переменного тока, а затем две его фазы подключают к источнику постоянного тока. При этом в машине появляется постоянный магнитный поток возбуждения индуцирующий в обмотках ротора переменную ЭДС. Чтобы создать тормозной момент, к обмоткам ротора подключают активное сопротивление, в котором гасится энергия, возникающая в машине в результате торможения приводного механизма. В результате динамического торможения асинхронная машина превращается в автономный синхронный генератор, работающий на реостат.
Рабочие характеристики АД.
Рабочие характеристики АД показывают зависимость частоты вращения n2, скольжения S, вращающего момента М, КПД h, коэффициент мощности cosj, тока статора I1, активной мощности Р1 от полезной мощности Р2.
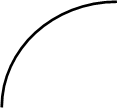
1. Скоростная характеристика n = f(P2) показывает, что частота вращения ротора при изменении нагрузки на валу в диапазоне от холостого хода до номинальной уменьшается незначительно (рис.1).
2. Скольжение S с увеличением нагрузки возрастает (рис.2).
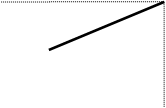
3. Зависимость между вращающим моментом М2 и полезной мощностью Р2 определяется отношением: Р2=М2×w2, отсюда М2=Р2/w2 или по-другому М2=9550×Р2/nq.
![]() n2
n2
![]()
1.0
0.8
0.6
0.4
0.2
![]() 0
0
1 Р2/Рном
Рис. 1. Скоростная характеристика АД.
![]() S
S
![]()
![]() 0.04
0.04
![]()
1 Р2/Рном
Рис.2. зависимость S от Р2.
М2/Мном
![]()
![]() 1.0
1.0
0.8
0.6
![]() 0
0
Р2/Рном
Рис.3.
Поскольку частота вращения изменяется мало, эта зависимость близка к линейной (рис.3).
4. Зависимость КПД h от мощности Р2 на валу определяется отношением мощностей Р2/Р1, которое в свою очередь, определяется величиной потерь энергии в двигателе. Современные АД имеют высокий КПД, достигающий 95%. Максимальный КПД АД имеет тогда, когда переменные потери энергии - потери в проводах обмоток статора и ротора - равны постоянным потерям - потерям в магнитопроводе на гистерезис и вихревые токи. Учитывая, что двигатели работают в основном при нагрузках, меньших номинальной, их проектируют на максимальный КПД примерно при 0,75Рном.
h
![]()
![]() 1.0
1.0
0.5
![]()
0 0.75 1 Р2/Рном
5. Ток I1, потребляемый двигателем из сети, возрастает почти по линейному закону, т.к. он связан прямой зависимостью с вращающим моментом двигателя.
![]()
J1/J1ном
1.0
![]()
0.3
![]()
0 1 Р2/Рном
6. Коэффициент мощности cosj определяется соотношением активной и реактивной мощностей двигателя.
Активная мощность Р1 обусловлена как полезной нагрузкой на валу, так и потерями энергии.
Реактивная мощность Q1 вызвана наличием переменных магнитных потоков.
Коэффициент мощности: cosj=![]()
При холостом ходе двигателя энергия, потребляемая из сети, расходится на открытие небольших потерь, активная мощность двигателя мала по сравнению с реактивной. Коэффициент мощности при холостом ходе - 0,1...0,3.
С увеличением нагрузки активная мощность увеличивается, а реактивная практически остается постоянной, т.к. энергия, запасаемая во вращающемся магнитном поле, практически не зависит от расхода энергии на совершение полезной механической работы и нагрев двигателя. При номинальной нагрузке коэффициент мощности достигает наибольшего значения 0,75...0,92. Чем большую мощность имеет двигатель тем больше значение коэффициент мощности.
![]()
cosj1
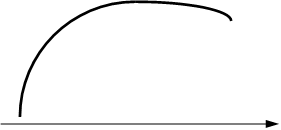
0 1 Р2/Рном
Пуск асинхронных двигателей.
При пуске двигателя должны удовлетворяться основные требования: пусковой момент долен быть достаточно большим, а пусковые токи - по возможности малыми.
Практически используют следующие способы пуска:
1) непосредственное подключение обмотки статора к сети(прямой пуск);
2) понижение напряжения, подводимого к статору при пуске;
3) подключение к обмотке ротора пускового реостата;
1)Прямой пуск применяют для пуска асинхронного двигателя с короткозамкнутым ротором. Двигатели этого типа малой и средней мощности обычно проектируются так, чтобы при непосредственном подключении обмотки статора к сети возникающие пусковые токи не создавали чрезмерных электродинамических усилий и повышения температуры, опасных с точки зрения механической и термической прочности основных элементов машины.
В асинхронных двигателях отношение L/R сравнительно мало (особенно в малых двигателях), поэтому переходной процесс в момент включения характеризуется весьма быстрым затуханием свободного тока. Это позволяет пренебречь свободны током и учитывать только установившееся значение тока переходного процесса. Недостатком данного способа пуска кроме сравнительно небольшого пускового момента является также большой бросок пускового тока. Несмотря на указанные недостатки, пуск двигателя путем непосредственного подключения обмотки статора к сети широко применяют благодаря простоте и хорошим технико-экономическим свойствам двигателя с короткозамкнутым ротором - низкой стоимости и высоким энергетическим показателям (h, cosj и др.).
2)Пуск при пониженном напряжении применяют для асинхронных двигателей с короткозамкнутым ротором большой мощности, а также для двигателей средней мощности при недостаточно мощных электрических сетях. Понижение напряжения может осуществляться следующими путями.
а) переключением обмотки статора с помощью переключателя с нормальной схемы “треугольник” на пусковую схему “звезда”. При этом напряжение, подаваемое на фазы обмотки статора, уменьшается в ![]() раз, что обуславливает уменьшение фазных токов в
раз, что обуславливает уменьшение фазных токов в ![]() раз и линейных токов в 3 раза. По окончанию процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему.
раз и линейных токов в 3 раза. По окончанию процесса пуска и разгона двигателя до номинальной частоты вращения обмотку статора переключают обратно на нормальную схему.
б) включение в цепь обмотки статора на период пуска добавочных активных (резисторов) или реактивных (реакторов) сопротивлений.
При этом на указанных сопротивлениях создаются некоторые падения напряжения DU, пропорциональные пусковому току, вследствие чего к обмотке статора подается пониженное напряжение. По мере разгона двигателя снижается ЭДС e2, индуцированная в обмотке ротора, а следовательно, и пусковой ток. В результате уменьшается падение напряжения DU на указанных сопротивлениях и автоматически возрастает приложенное к двигателю напряжение. После окончания разгона добавочные резисторы или реакторы замыкаются накоротко контактом К1.
в) подключением двигателя к сети через понижающий автотрансформатор, который может иметь несколько ступеней, переключаемых в процессе пуска соответствующей аппаратурой.
Недостатком указанных методов пуска путем понижения напряжения является значительное уменьшение пускового и максимального моментов двигателя, которые пропорциональны квадрату приложенного напряжения, поэтому их можно использовать при пуске двигателя без нагрузки или при незначительной нагрузке.
3)Пуск с помощью реостата в цепи ротора применяют для пуска двигателей с фазным ротором. Если в цепь ротора включить пусковой реостат R, то активное сопротивление цепи ротора увеличится. При этом максимальный момент не изменяется, а пусковой момент возрастает.
Недостатком данного способа является его относительная сложность и необходимость применения более дорогих двигателей с фазным ротором. В связи с этим двигатели с фазным ротором применяют только при тяжелых условиях пуска, когда необходимо развивать максимально возможный пусковой момент.
Регулирование частоты вращения асинхронных двигателей.
Частота вращения асинхронного двигателя: n2 = n1×(1-S) = 60×f1×(1-S)/p
Из этой формулы следует 3 принципиально возможных метода регулирования асинхронных двигателей:
1) изменение частоты f1 (частное регулирование);
2) изменение числа полюсов 2р;
3) изменение скольжения S.
Скольжения S обычно изменяют путем изменения потерь в цепи ротора с помощью реостата, но в некоторых случаях для этого изменяют величину питающего напряжения.
Способ частотного регулирования частоты вращения асинхронных двигателей.
Этот способ позволяет применять наиболее надежные и дешевые асинхронные двигатели с короткозамкнутым ротором. Однако для изменения частоты питающего напряжения требуется наличие источника электрического тока переменной частоты.
Закон Костенко - характеристики асинхронного двигателя при частотах питающего напряжения, отличных от номинальной, зависят от соотношения между напряжением сети U1 и частотой f1.
Зависимость максимального момента от напряжения и частоты выражается формулой:
Мmax=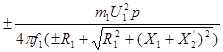 ,
,
где m1 - число фаз статора; U1 - напряжение; R1, X1 соответственно активное и реактивное сопротивление статора; знак “+” относится к двигательному режиму, “-” - к генераторному.
Пренебрегая значением R1 в знаменателе получим
Мmax ![]() =
= ![]()
Mmax = ![]() ; где с - постоянная
; где с - постоянная
Из этой формулы следует, что при изменении частоты f1 изменяется максимальный момент, т.е. отношение максимального момента Мmax к нагрузочному моменту Мн. Для устойчивой работы двигателя необходимо обеспечить достаточную перегрузочную способность. Мmax/Мном>=1.7...2
Следовательно, при частотном регулировании должно быть обеспечено условие Ммах1/Мн1=Ммах2/Мн2=const, где индексы 1 и 2 относятся к различным частотам питающего напряжения, т.е. к различным частотам вращения.
Т.к. согласно выражению (*)
Ммах1/Ммах2=(U211/U212)*(f212/f211)
то получаем основной закон частотного регулирования:
U12/U11=(f12/f11)* (**)
(**)
При постоянном значении нагрузочного момента Мн1=Мн2=const это уравнение имеет вид
U11/f11=U12/f12=const
т.е. питающее напряжение следует изменять прямо пропорционально его частоте. При этом мощность двигателя увеличивается прямо пропорционально возрастанию частоты вращения.
Если требуется поддерживать режим постоянной мощности электродвигателя ![]() , то получим уравнение (
, то получим уравнение (![]() )
)
MH1*f11=MH2*f12=const
С учетом выражения (**)
U12/U11=![]()
Регулирование частоты вращения асинхронных двигателей путем изменения числа полюсов.
Такое регулирование позволяет получить ступенчатое изменение частоты вращения. Для этого каждую фазу обмотки статора разделяют на две части, которые переключают с последовательного соединения на параллельное. При этом число полюсов уменьшается в два раза, а следовательно, частота вращения магнитного поля увеличивается в два раза.
Асинхронные двигатели с переключением числа полюсов называют многоскоростными. Многоскоростные двигатели имеют следующие недостатки: большие габариты и массу по сравнению с двигателями нормального исполнения, а следовательно, и большую стоимость.
Регулирование частоты вращения асинхронных двигателей путем включения реостата в цепь ротора.
Этот метод регулирования может быть использован только для двигателей с фазным ротором. При включении в цепь ротора добавочных активных сопротивлений изменяется форма зависимости M=f(S) и механической характеристики n2=f(M) двигателя.
При включении добавочных сопротивлений увеличивается скольжение, следовательно, частота вращения двигателя уменьшается (n2=n1*(1-S)).
Недостатки: большие потери энергии в регулировочном реостате, чрезмерно мягкая механическая характеристика двигателя при большом сопротивлении в цепи ротора, т.е. небольшому изменению нагрузочного момента соответствует существенное изменение частоты вращения.
Регулирование частоты вращения асинхронных двигателей путем изменения питающего напряжения.
Этот способ можно осуществить посредством тиристорного регулятора напряжения, в каждой фазе которого включено по два тиристора.
А
![]()
![]()
![]() В
В
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]() С
С



![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
![]()
М
При изменении угла регулирования тиристоров изменяется действующее значение напряжения, подаваемого на асинхронный двигатель. Если вход блока управления тиристорами связать с системой обратной связи с датчиком частоты вращения двигателя, то регулятор будет поддерживать неизменную частоту вращения.
При регулировании питающего напряжения U изменяется форма механической характеристики, что при постоянном нагрузочном моменте М приводит к изменению скольжения и частоты вращения. Практическое значение для регулирования имеет уменьшение напряжения, т.к. существенное его увеличение приводит к недопустимому возрастанию тока холостого хода ![]()
Изменение направления вращения асинхронных двигателей.
Для изменения направления вращения ротора электродвигателя надо изменить направление вращения магнитного поля. В трехфазных машинах это осуществляется путем переключения двух любых проводов, подводящих ток из сети.
Режим электромагнитного торможения асинхронных двигателей.
Если при вращающемся роторе изменяется направление вращения поля асинхронной машины, то оно оказывает на ротор тормозящее действие. При этом частота вращения ротора n2<0, а следовательно, скольжение S>1. В этом режиме машина потребляет из сети электрическую мощность.
Чтобы перевести двигатель в режим электромагнитного торможения, следует изменить направление вращения магнитного поля (переключив два любых провода, присоединяющих фазы обмотки статора к сети трехфазного тока) и ввести в цепь ротора активное сопротивление.
Добавочное активное сопротивление в цепи ротора необходимо для ограничения силы тока машины, который при замкнутом на коротко роторе достигает большого значения.
Практически режим электромагнитного торможения используют для быстрого торможения механизмов. Его называют также торможением противовключением. Достоинство: возможность создавать большие тормозные моменты при низких частотах вращения.
При уменьшении частоты вращения ротора до нуля необходимо отключить двигатель от сети, иначе ротор начнет вращаться в обратном направлении.
Режим динамического торможения асинхронных двигателей.
В данном режиме статор асинхронной машины отключают от сети переменного тока, а затем две его фазы подключают к источнику постоянного тока. При этом в машине появляется постоянный магнитный поток возбуждения индуцирующий в обмотках ротора переменную ЭДС. Чтобы создать тормозной момент, к обмоткам ротора подключают активное сопротивление, в котором гасится энергия, возникающая в машине в результате торможения приводного механизма. В результате динамического торможения асинхронная машина превращается в автономный синхронный генератор, работающий на реостат.
Рекуперативный режим торможения (генераторный режим).
Переход от динамического режима в генераторный происходит автоматически, когда частота вращения ротора n2 превышает частоту вращения магнитного поля n1.
Пример: спуск груза краном, когда двигатель включается согласно с направлением спуска и скорость перемещения груза ограничивается значением, близким к n1, а энергия запасенная грузом отдается в сеть.